Dynamic behavior of an aircushion
The dynamic behavior of an aircushion facade element to a wind load is simulated with a mass spring model.
When you run into a brick wall, it hurts. The reaction forces that the wall must produce in order to counteract your momentum causes this pain. But when you place a mattress in front of the wall, it will hurt a lot less. This is because the mattress is capable of absorbing a large portion of the energy from your momentum, resulting in lower reaction forces from the wall.
When a wind load hits a traditional rigid facade, the facade must produce a reaction force that counters all of the wind energy. Replacing the rigid facade with an air cushion should reduce the peak amount of energy that the facade needs to resist resulting in lower reaction forces, just like the mattress does for the brick wall.
Lower reaction forces means that the building needs less strength to resist a wind load. The lower strength requirement results in smaller construction dimensions and a lower need for materials.
My thesis researches if this aircushion indeed reduces the reaction forces to a wind load and if so, how and by what degree. This will be done from an engineer’s point of view; we engineers like to start simple and in this phase we don't need exact answers but want to study the global behavior. That’s why the air cushion will be simulated by a mass spring system where the springs represent the tension strength of the membrane and the masses the weight of the membrane and air inside the air cushion.
In other words the air cushion will be represented by a discrete system of masses connected to each other with springs. The more masses and spring you use, the more it will approach a continue system.
The mass spring system that represents the aircushion will be solved using the Lagrange equation of motion. The Lagrange formula is based on the virtual work of the minimal amount of degrees of freedom that a system needs to describe its motion. These D.o.F.’s are called generalized coordinates and are used to describe the position of the individual masses at a certain point in time.
Solving this equation of motion for the accelerations of the generalized coordinates gives a set of ordinary differential equations, or ODE's. These ODE's are often impossible to solve analytical, and are therefore solved numerical with the help of special ode solvers based on an explicit Runge-Kutta formula.
Matlab is an important tool that lets you program your own scripts that will calculate these Lagrange Equations of motion and solve the ODE's numerically in a certain time domain. Without Matlab it would be nearly impossible to find and solve the ODE's by hand because of their enormous size; it would simply take forever.
The numerical solutions of the ODE's give the generalized coordinates of the system at a certain time step in the given time domain. These generalized coordinates can then be used to find the relative coordinates of the masses describing the system. A script can be written with Matlab to displays these mass coordinates in time through an animation.
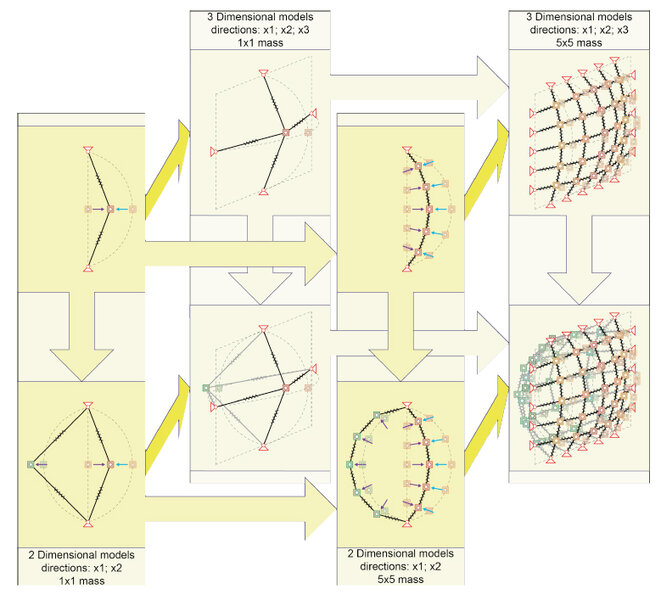
The research of the air cushion model will be done in steps. First it will only have a single mass suspended between two springs simulating the front side of the air cushion subjected to the wind load. Then is will have three masses followed by five. When the model works well, the other backside of the air cushion will be added followed by a third dimension. The goal is to gain a working 3D model with 50 masses that gives us the reaction forces needed to resist a random wind load. This model will give me the possibility to analyze the size and factors on the absorption of the wind energy by an air cushion.
Student: Maarten Casteelen
Commission: A.P.H.W. Habraken / A.S.J. Suiker