Systems Engineering laboratory
The Systems Engineering lab houses experimental facilities of the CST, DC and Robotics sections.

Supervisory Control HIL setup
The set-up consists of a Siemens PLC three laptops, and a screen. It can be used to analyze the performance (cycle times) of supervisory controller implementations and to test communication to other subsystems such as an operator interface. On one laptop, the physical part of a system can be simulated. The second laptop, to which the screen is connected, is needed for a GUI implementation. The third laptop is the PLC-engineering unit. Using this set-up, the supervisory controller and the GUI can be validated as if they were connected to the real system.
FESTO setup
The Festo workstations are used in four final case studies for the third year bachelor course 4TC00. This course introduces students to the model-based systems engineering framework for the design of supervisory controllers as part of a high-tech system. In this framework, combined continuous-time and discrete-event models are made of the uncontrolled system (plant) and of the supervisory controller. After analysis of the behavior of these models by means of simulation and 2D visualisation, the real-time controller is generated from the model of the controller. This real-time controller is first tested on a 3D Digital Twin of the system and finally on the actual machine. The course is concluded with an assignment in which model-based design of a supervisory controller is applied to an actual Festo workstation in a production line.

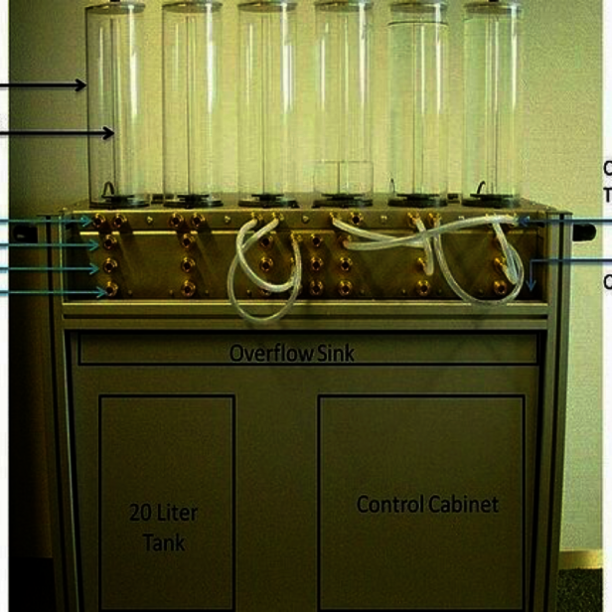
Liquitrol system
In the Liquitrol system the vessels act as the buffers and the pumps (not visible) act as the production machines of the manufacturing network. The switchpanel in front allows the user to make all kinds of configurations. Flexible tubing is used to make the desired connections between vessels and pumps.
The Kumar-Seidmann network is an example of a manufacturing network that will show unstable behavior when controlled in the obvious way. With the Liquitrol system the effects of both the obvious and the correct control strategy can be shown.
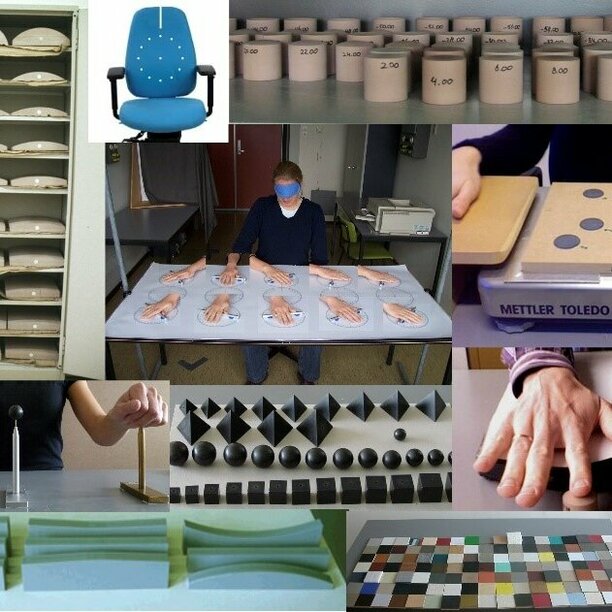
Haptics lab
One part of the HapLab is used for both fundamental and applied human psychophysical perception experiments. For the fundamental part, many well-defined stimulus sets have been created (see picture) to investigate human perceptual performance. For the more applied part, the focus lies on investigating how well vibrotactile messages can be perceived.
The second part of the HapLab is used for the experimental section of the work performed by the Reshape Lab, in which soft robotics and haptics are combined. The Reshape lab brings together fundamental work on modelling and control of soft robots, material science, and haptic perception to create novel haptic applications for rehabilitation, tele-operation and Virtual Reality.
Points of contact
LAB USAGE
The following sections all use the facilities of this Laboratory.
Contact us
-
Postal address
PO Box Postbus 5135600 MB EindhovenNetherlands -
Management Assistant Office